최근포스팅
-
 NULL ptr
트렌드 코리아 2026 | 키워드, 요약, 인사이트
2026년 붉은 말의 해.트렌드 코리아 2026은 메인 슬로건으로 'Horse Power'를 내세웠다.온갖 AI를 사용해 빠르게 달리되, 결국 방향을 잡는 것은 사람이라는 메세지를 담고 있다.이번에는 2026년 국내외 각 분야를 휩쓸 10대 트렌드를 조망하고, 그 핵심내용과 출현배경, 현업시사점을 파악할 수 있다. 글로벌기업 현직 임원과 AI전문가의 심층대담을 통해 비즈니스 현장에 활용할 아이디어, 사업전략, 실무적용점 등을 습득할 수도 있다. 주요 키워드 10가지 : 요약주요 키워드 10가지와 그 의미는,1) '휴먼 인 더 루프' - AI 시대에 인간의 개입이 결과의 품질을 결정함2) '필코노미' - 감정을 소비 기준으로 삼는 트렌드3) '제로 클릭' - 검색 전 AI 추천이 중요해지는 현상4) '레디..
NULL ptr
트렌드 코리아 2026 | 키워드, 요약, 인사이트
2026년 붉은 말의 해.트렌드 코리아 2026은 메인 슬로건으로 'Horse Power'를 내세웠다.온갖 AI를 사용해 빠르게 달리되, 결국 방향을 잡는 것은 사람이라는 메세지를 담고 있다.이번에는 2026년 국내외 각 분야를 휩쓸 10대 트렌드를 조망하고, 그 핵심내용과 출현배경, 현업시사점을 파악할 수 있다. 글로벌기업 현직 임원과 AI전문가의 심층대담을 통해 비즈니스 현장에 활용할 아이디어, 사업전략, 실무적용점 등을 습득할 수도 있다. 주요 키워드 10가지 : 요약주요 키워드 10가지와 그 의미는,1) '휴먼 인 더 루프' - AI 시대에 인간의 개입이 결과의 품질을 결정함2) '필코노미' - 감정을 소비 기준으로 삼는 트렌드3) '제로 클릭' - 검색 전 AI 추천이 중요해지는 현상4) '레디..
-
 개발자의 기록 노트
Architecture Pattern VS Architecture Style
소프트웨어 아키텍처 설계를 공부하다보니 Architecture Pattern라는 용어와 Architecture Style라는 용어가 혼용되는 것을 보게 되었습니다. 이 둘은 어떤 차이가 있는지, 동의어인지 찾아보고 정리한 내용입니다.Architectural patterns focus on problem-riented architectural solution, whereas Architectural style focus on structural or behavioral characteristics of related software architectures. 아키텍처 패턴은 문제 지향적인 아키텍처 솔루션에 중점을 두는 반면에, 아키텍처 스타일은 관련된 소프트웨어 아키텍처의 구조나 행위 특성에 중점을 둔다고..
개발자의 기록 노트
Architecture Pattern VS Architecture Style
소프트웨어 아키텍처 설계를 공부하다보니 Architecture Pattern라는 용어와 Architecture Style라는 용어가 혼용되는 것을 보게 되었습니다. 이 둘은 어떤 차이가 있는지, 동의어인지 찾아보고 정리한 내용입니다.Architectural patterns focus on problem-riented architectural solution, whereas Architectural style focus on structural or behavioral characteristics of related software architectures. 아키텍처 패턴은 문제 지향적인 아키텍처 솔루션에 중점을 두는 반면에, 아키텍처 스타일은 관련된 소프트웨어 아키텍처의 구조나 행위 특성에 중점을 둔다고..
-
 개발자의 기록 노트
GRASP - Craig Larman의 소프트웨어 설계 원칙
GRASP는 General Responsibility Assignment Software Patterns 의 앞글자를 딴 것이다.직역하면 대략 '일반 책임 할당 소프트웨어 패턴' 정도 된다.패턴이 들어가는 걸 보면 알 수 있듯이, GoF의 디자인패턴과도 관련이 있다.여기에서는 Craig Larman의 9가지 원칙을 이야기 하고 있는데, 이 각각들은 Coupling을 낮추거나, Cohesion과 Reusability를 높이고 Flexibility를 높이기 위한 원칙들이다.우선.. 'OOAD를 사용하여 소프트웨어를 구축하는 일반적인 작업'이 어떤 순서로 이뤄지는지 다시 상기해보자.1. 요구사항 식별2. 도메인모델 만들기3. 디자인모델 만들기 - 소프트웨어 클래스들에 메소드와 속성 추가 - 객체들 간 상호..
개발자의 기록 노트
GRASP - Craig Larman의 소프트웨어 설계 원칙
GRASP는 General Responsibility Assignment Software Patterns 의 앞글자를 딴 것이다.직역하면 대략 '일반 책임 할당 소프트웨어 패턴' 정도 된다.패턴이 들어가는 걸 보면 알 수 있듯이, GoF의 디자인패턴과도 관련이 있다.여기에서는 Craig Larman의 9가지 원칙을 이야기 하고 있는데, 이 각각들은 Coupling을 낮추거나, Cohesion과 Reusability를 높이고 Flexibility를 높이기 위한 원칙들이다.우선.. 'OOAD를 사용하여 소프트웨어를 구축하는 일반적인 작업'이 어떤 순서로 이뤄지는지 다시 상기해보자.1. 요구사항 식별2. 도메인모델 만들기3. 디자인모델 만들기 - 소프트웨어 클래스들에 메소드와 속성 추가 - 객체들 간 상호..
-
 Algorithm
DBSCAN 클러스터링 알고리즘 - 머신러닝
본 글은 출처에서 발췌하여 번역한 것 임을 서두에 밝힙니다.출처 : https://www.kdnuggets.com/2020/04/dbscan-clustering-algorithm-machine-learning.html2022/04/04 Nagesh Singh Chauhan이 KDnuggets에 작성한 글입니다.소개: Nagesh Singh Chauhan은 CirrusLabs의 빅데이터 개발자입니다. 통신, 분석, 영업, 데이터 과학 등 다양한 분야에서 4년 이상의 경력을 보유하고 있으며, 다양한 빅데이터 구성 요소를 전문으로 다룹니다.DBSCAN 알고리즘과 그것을 파이썬으로 구현한 소개 내용.2014년, DBSCAN 알고리즘은 세계 최고의 데이터 마이닝 컨퍼런스인 ACM SIGKDD에서 시간 테스트 상(..
Algorithm
DBSCAN 클러스터링 알고리즘 - 머신러닝
본 글은 출처에서 발췌하여 번역한 것 임을 서두에 밝힙니다.출처 : https://www.kdnuggets.com/2020/04/dbscan-clustering-algorithm-machine-learning.html2022/04/04 Nagesh Singh Chauhan이 KDnuggets에 작성한 글입니다.소개: Nagesh Singh Chauhan은 CirrusLabs의 빅데이터 개발자입니다. 통신, 분석, 영업, 데이터 과학 등 다양한 분야에서 4년 이상의 경력을 보유하고 있으며, 다양한 빅데이터 구성 요소를 전문으로 다룹니다.DBSCAN 알고리즘과 그것을 파이썬으로 구현한 소개 내용.2014년, DBSCAN 알고리즘은 세계 최고의 데이터 마이닝 컨퍼런스인 ACM SIGKDD에서 시간 테스트 상(..
Car
-
 i30 2세대 (GD)
[i30 GD] 운전연습용 중고차 셋팅 - 실내 디테일링 세차
운전연습용으로 구입한 중고차. 현대 i30 GD 12년식. GDI 엔진 모델. https://techlog.gurucat.net/361 [i30 GD] 운전연습용 중고차. 12년식 27,000km 구매기. 같이사는 분이 2021년 운전면허를 취득한 뒤 차를살까? 조금만 더 버틸까? 고민하기를 1년. 고민만 하다가 드디어 차량을 구입하기로 결정. 그분에게는 첫차이니 만큼 심혈을 기울여서 골라보기 techlog.gurucat.net 상품화가 되어있어 얼핏보면 중고차 치고 실내도 깨끗해보이지만, 그래도 찝찝하고 뭔가 마음에 들지 않았다. 내부의 전체 시트탈거 후 청소를 해주는 업체에 맡기기로 결정. 그렇지만 업체 알아보고 후기 찾아보고 하는게 귀찮아서, 렉서스 IS250 블랙박스 교체 작업을 맡겼던 적이 있는..
i30 2세대 (GD)
[i30 GD] 운전연습용 중고차 셋팅 - 실내 디테일링 세차
운전연습용으로 구입한 중고차. 현대 i30 GD 12년식. GDI 엔진 모델. https://techlog.gurucat.net/361 [i30 GD] 운전연습용 중고차. 12년식 27,000km 구매기. 같이사는 분이 2021년 운전면허를 취득한 뒤 차를살까? 조금만 더 버틸까? 고민하기를 1년. 고민만 하다가 드디어 차량을 구입하기로 결정. 그분에게는 첫차이니 만큼 심혈을 기울여서 골라보기 techlog.gurucat.net 상품화가 되어있어 얼핏보면 중고차 치고 실내도 깨끗해보이지만, 그래도 찝찝하고 뭔가 마음에 들지 않았다. 내부의 전체 시트탈거 후 청소를 해주는 업체에 맡기기로 결정. 그렇지만 업체 알아보고 후기 찾아보고 하는게 귀찮아서, 렉서스 IS250 블랙박스 교체 작업을 맡겼던 적이 있는..
-
 렉서스 IS250 3세대 (XE30)
렉서스 IS250 정기점검 가격 및 점검 항목
보통 렉서스 차량이라고 하면 고장이 없는 이미지가 강하다.잔고장이 거의 없어서 대충 엔진오일만 제때 갈아주고 타면 된다고들 여기기도 하고, 심지어 렉서스 차량의 단점은 '고장이 안나는 것이다. 그래서 지겨워져도 차를 못바꾼다' 라는 사람도 있다. 이 내용이 렉서스의 어느 차량에 해당되는 말인지는 모르겠지만, 나는 그래도 기본적인 정기점검은 주기적으로 해줘야 한다고 생각한다.물론, 잔고장 없다고 느껴지는 차는 맞는 것 같다. 2년 타는동안 크게 속썩이는 일은 없었으니... 다른 차량들도 대부분 그러할 것 같은데, 내가 타고 있는 2014년식 IS250 (3세대) 차량 역시 10,000km 를 주행 할 때 마다 렉서스 정비센터에 가서 정기점검을 받고 있다. IS250 정기점검 가격유상 정기점검시 서비스센터에..
렉서스 IS250 3세대 (XE30)
렉서스 IS250 정기점검 가격 및 점검 항목
보통 렉서스 차량이라고 하면 고장이 없는 이미지가 강하다.잔고장이 거의 없어서 대충 엔진오일만 제때 갈아주고 타면 된다고들 여기기도 하고, 심지어 렉서스 차량의 단점은 '고장이 안나는 것이다. 그래서 지겨워져도 차를 못바꾼다' 라는 사람도 있다. 이 내용이 렉서스의 어느 차량에 해당되는 말인지는 모르겠지만, 나는 그래도 기본적인 정기점검은 주기적으로 해줘야 한다고 생각한다.물론, 잔고장 없다고 느껴지는 차는 맞는 것 같다. 2년 타는동안 크게 속썩이는 일은 없었으니... 다른 차량들도 대부분 그러할 것 같은데, 내가 타고 있는 2014년식 IS250 (3세대) 차량 역시 10,000km 를 주행 할 때 마다 렉서스 정비센터에 가서 정기점검을 받고 있다. IS250 정기점검 가격유상 정기점검시 서비스센터에..
-
 i30 2세대 (GD)
[i30 GD] 배우자의 첫번째 자동차맞이 준비물
함께사는 분이 운전면허를 따고 첫번째 중고차를 샀다.운전연습용 + 출퇴근용.현대 i30 GD. 2012년식. 주행거리 2만 7,500km10년이나 된 중고차이지만 그녀에게는 나름 의미있을 생애 첫 자동차.같이 머리를 맞대고 고민 끝에 애칭도 지어줬다."빵붕이"그리고, 빵붕이와 함께 즐거운 car-life를 즐기라고 몇가지 선물들을 준비해줬다. 0. 실내 디테일링 세차운전면허 따고 첫 연습용 자동차로 중고차 구매를 했다면, 그리고 차량 연식이 꽤 된다면 일단 실내 디테일링 세차 부터 하는 게 좋다.중고차 구매 후 0순위 작업.전차주(들)이 누구인지도 모르고,그들이 차안에서 뭘 했을지 모르기 때문이다.또한 이 중고차가 매장에 전시되어 있는 동안,몇명이나 보러 와서 만져보고 시승을 해보고 살펴보고 했을지 모..
i30 2세대 (GD)
[i30 GD] 배우자의 첫번째 자동차맞이 준비물
함께사는 분이 운전면허를 따고 첫번째 중고차를 샀다.운전연습용 + 출퇴근용.현대 i30 GD. 2012년식. 주행거리 2만 7,500km10년이나 된 중고차이지만 그녀에게는 나름 의미있을 생애 첫 자동차.같이 머리를 맞대고 고민 끝에 애칭도 지어줬다."빵붕이"그리고, 빵붕이와 함께 즐거운 car-life를 즐기라고 몇가지 선물들을 준비해줬다. 0. 실내 디테일링 세차운전면허 따고 첫 연습용 자동차로 중고차 구매를 했다면, 그리고 차량 연식이 꽤 된다면 일단 실내 디테일링 세차 부터 하는 게 좋다.중고차 구매 후 0순위 작업.전차주(들)이 누구인지도 모르고,그들이 차안에서 뭘 했을지 모르기 때문이다.또한 이 중고차가 매장에 전시되어 있는 동안,몇명이나 보러 와서 만져보고 시승을 해보고 살펴보고 했을지 모..
-
 자동차 이야기
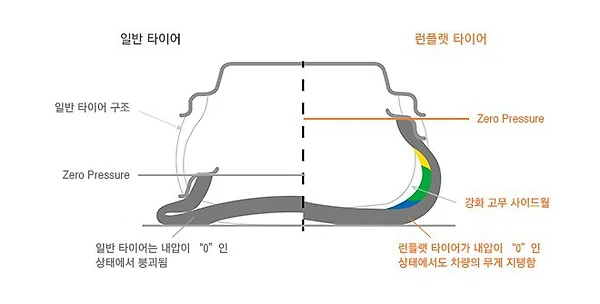
런플랫 타이어 (Run Flat Tire) 장점 단점
자동차 타이어에 대한 관심최근 타이어에 대한 관심이 생겼다.얼마전 4만 km를 탄 타이어중 앞쪽 한개가 펑크나면서, 전체 4개를 일시에 교체하게 되면서이다.어떤 타이어를 끼울까? 참많이 고민했다. 22살부터 현재까지 만 9년간 운전을 하면서 그동안 나는 타이어를 그다지 중요하지 않게 여겼다.타이어란 단지, 오래오래 사용가능하고 굴러가기만 하면 된다고 생각했다. 그러나 우리나라 전체적인 자동차문화가 발달하고 그 깊이가 깊어지면서, 다양한 매체를 통해서 쉽게 자동차에 대한 정보를 접하게 되었다.그러면서 자동차의 타이어에 관심을 갖게 되었다. 타이어의 중요성을 깨닫게 된 것이다. 여러 타이어 회사들은 단순히 내구성이 뛰어나다는 것을 떠나서 조금 더 접지력이 좋은 타이어, 특정 계절에 적합한 성능을 발휘하는 타..
자동차 이야기
런플랫 타이어 (Run Flat Tire) 장점 단점
자동차 타이어에 대한 관심최근 타이어에 대한 관심이 생겼다.얼마전 4만 km를 탄 타이어중 앞쪽 한개가 펑크나면서, 전체 4개를 일시에 교체하게 되면서이다.어떤 타이어를 끼울까? 참많이 고민했다. 22살부터 현재까지 만 9년간 운전을 하면서 그동안 나는 타이어를 그다지 중요하지 않게 여겼다.타이어란 단지, 오래오래 사용가능하고 굴러가기만 하면 된다고 생각했다. 그러나 우리나라 전체적인 자동차문화가 발달하고 그 깊이가 깊어지면서, 다양한 매체를 통해서 쉽게 자동차에 대한 정보를 접하게 되었다.그러면서 자동차의 타이어에 관심을 갖게 되었다. 타이어의 중요성을 깨닫게 된 것이다. 여러 타이어 회사들은 단순히 내구성이 뛰어나다는 것을 떠나서 조금 더 접지력이 좋은 타이어, 특정 계절에 적합한 성능을 발휘하는 타..
-
 렉서스 IS250 3세대 (XE30)
3세대 IS250 스파이럴케이블(클럭스프링) 교환
3세대 IS250의 스티어링휠(핸들)과 좌석은 위치 메모리 기능이 있다.시동을 끄면 제자리로 돌아가고, 시동을 켜면 내가 설정해뒀던 위치로 올라온다.이 기능으로 핸들은 하루에도 몇번씩 위치가 들어갔다 나왔다, 올라갔다 내려갔다 한다.2024년 어느순간 핸들 오른쪽에 위치한 버튼 중 'Back' key가 눌러도 동작을 하지 않았다.불편했지만 무시하고 탔다. 그래도 가끔은 눌렸고, 수동으로 핸들 위치를 최대한 낮추면 눌렸다.증상으로 보건대, 핸들 안에 있는 스파이럴 케이블의 접촉 불량일 거라 추측했다.그리고 몇달 뒤 어느순간 Back key 뿐만 아니라 Enter key도 눌렀을 때 동작을 하지 않았다.그리고 또 수 주 뒤 어느순간 그 key과 더불어 위아래 좌우 방향키도 동작을 하지 않게되었다.다 무시하고..
렉서스 IS250 3세대 (XE30)
3세대 IS250 스파이럴케이블(클럭스프링) 교환
3세대 IS250의 스티어링휠(핸들)과 좌석은 위치 메모리 기능이 있다.시동을 끄면 제자리로 돌아가고, 시동을 켜면 내가 설정해뒀던 위치로 올라온다.이 기능으로 핸들은 하루에도 몇번씩 위치가 들어갔다 나왔다, 올라갔다 내려갔다 한다.2024년 어느순간 핸들 오른쪽에 위치한 버튼 중 'Back' key가 눌러도 동작을 하지 않았다.불편했지만 무시하고 탔다. 그래도 가끔은 눌렸고, 수동으로 핸들 위치를 최대한 낮추면 눌렸다.증상으로 보건대, 핸들 안에 있는 스파이럴 케이블의 접촉 불량일 거라 추측했다.그리고 몇달 뒤 어느순간 Back key 뿐만 아니라 Enter key도 눌렀을 때 동작을 하지 않았다.그리고 또 수 주 뒤 어느순간 그 key과 더불어 위아래 좌우 방향키도 동작을 하지 않게되었다.다 무시하고..
-
 렉서스 IS250 3세대 (XE30)
[정비기록] 렉서스 IS250, 방지턱 넘을때 찌그덕 소리
증상2017-2018 겨울, 렉서스 IS250를 타면서 맞이하는 두번째 겨울이다.그런데... 과속방지턱을 넘어갈 때 작년 겨울에는 듣지 못했던 "찌그덕", "찌걱" 하는 소음이 들리기 시작했다.상당히 저속인 시속 5km/h 정도로 방지턱을 넘을때는 들리지 않지만,10~20km/h 정도로 약간 속도가 붙은 상태로 방지턱을 넘을때는 들린다. 정비를 위해 수원 센트럴모터스 렉서스 서비스센터에 예약을 잡았다. 2018년 2월 2일 16시, 서비스센터에 들어가는 도로입구에도 과속방지턱이 설치되어 있었다. 아래 영상은 과속방지턱 지나갈때의 찌그덕 소리가 발생하는 부분이다. 소음의 원인 1 : 스테빌라이저 링크최초 서비스센터 점검 받은 후, '스테빌라이저 링크'가 '찌그덕' 소리의 원인이라고 이야기를 전달받았다.그러..
렉서스 IS250 3세대 (XE30)
[정비기록] 렉서스 IS250, 방지턱 넘을때 찌그덕 소리
증상2017-2018 겨울, 렉서스 IS250를 타면서 맞이하는 두번째 겨울이다.그런데... 과속방지턱을 넘어갈 때 작년 겨울에는 듣지 못했던 "찌그덕", "찌걱" 하는 소음이 들리기 시작했다.상당히 저속인 시속 5km/h 정도로 방지턱을 넘을때는 들리지 않지만,10~20km/h 정도로 약간 속도가 붙은 상태로 방지턱을 넘을때는 들린다. 정비를 위해 수원 센트럴모터스 렉서스 서비스센터에 예약을 잡았다. 2018년 2월 2일 16시, 서비스센터에 들어가는 도로입구에도 과속방지턱이 설치되어 있었다. 아래 영상은 과속방지턱 지나갈때의 찌그덕 소리가 발생하는 부분이다. 소음의 원인 1 : 스테빌라이저 링크최초 서비스센터 점검 받은 후, '스테빌라이저 링크'가 '찌그덕' 소리의 원인이라고 이야기를 전달받았다.그러..
-
 렉서스 IS250 3세대 (XE30)
[정비기록] 사이드미러 각도조절 고장 : 부품 교환
서론2016년에 중고로 구입하여지금까지 여전히 출퇴근에 사용하고 있는 2014년식 렉서스 IS250.내 생각에 렉서스에서 만든 차 라고 하면 고장없고 내구성 좋다는 이미지다.직전에 탔던 대우에서 만든 04년식 중형차의 다양하고도 잦은 잔고장이 워낙 스트레스였다.그 차를 탈 당시 나는 대학생이었기에, 더더욱 잔고장에 대한 스트레스가 컸다. 2~3개월에 한번 꼴로 지출이 발생하니.. 큰 금액은 아니지만 잔잔바리 10~40만원 짜리 잔고장들은 큰 수입없는 대학생으로서는 짜증나는 일이었다.그래서 '렉서스=내구성' 그 이미지만 보고 샀다.그리고 9년간 타며 느낀건 그 이미지값은 나름 한다는 것.큰 고장 잔 고장 전혀 없이 타왔다.그러나 차령이 11년차에 접어드니전자부품이 하나 둘 이상동작을 하기 시작한다. 고장..
렉서스 IS250 3세대 (XE30)
[정비기록] 사이드미러 각도조절 고장 : 부품 교환
서론2016년에 중고로 구입하여지금까지 여전히 출퇴근에 사용하고 있는 2014년식 렉서스 IS250.내 생각에 렉서스에서 만든 차 라고 하면 고장없고 내구성 좋다는 이미지다.직전에 탔던 대우에서 만든 04년식 중형차의 다양하고도 잦은 잔고장이 워낙 스트레스였다.그 차를 탈 당시 나는 대학생이었기에, 더더욱 잔고장에 대한 스트레스가 컸다. 2~3개월에 한번 꼴로 지출이 발생하니.. 큰 금액은 아니지만 잔잔바리 10~40만원 짜리 잔고장들은 큰 수입없는 대학생으로서는 짜증나는 일이었다.그래서 '렉서스=내구성' 그 이미지만 보고 샀다.그리고 9년간 타며 느낀건 그 이미지값은 나름 한다는 것.큰 고장 잔 고장 전혀 없이 타왔다.그러나 차령이 11년차에 접어드니전자부품이 하나 둘 이상동작을 하기 시작한다. 고장..


















